MobileNet V2
MobileNet V2 (2018.01)
등장 배경
- 해당 논문에서 언급하는 가장 큰 문제점은 ReLU의 정보 손실성이다.
- ReLU란 Vanishing Gradient를 막는 차선책이지 최선책은 아니다. Linear Activation이라는 완벽한 해결책이 있지만 Non-Linearity 때문에 이를 사용하지 못하는 것이다.
- 이에 대해 MobileNet V2는 약간의 비선형성을 포기하고 정보의 손실을 막는 방식을 택하여 Inverted Bottleneck이라는 구조를 선보인다.
- 결국 MobileNet V2는 MobileNet V1보다 성능이 더 개선되고 파라미터 수도 더 줄어든 결과를 내놓는다.
논문 출처
ReLU의 문제점
- ReLU는 $\max(0,x)$ 의 식을 갖는 활성화 함수이다.
- ReLU가 처음 제시되었을 때 이는 입력 값이 양수 일때 반환하는 기울기가 1이기에 그라디언트가 손실 되는 문제를 어느정도 해결해주었다.
- 하지만 이는 그라디언트 손실 문제를 완벽히 해결하진 않았다. 입력 값이 음수이면 기울기가 0으로 정보를 없애기 때문이다.
- 물론 Linear Activation을 사용한다면 그라디언트 손실 문제따위 금방 해결되어버리지만 비선형성을 잃기에 사용되지 않았다.
- 이에 대한 문제점을 시각화하기 위해 논문에선 AutoEncoder 실험을 진행하였다.
- AutoEncoder란 입력 값을 받고 한 층의 레이어를 통과 후 입력 값과 똑같은 값을 출력해내는 것이다.

- 실험 결과 ReLU는 상당히 어려워하는 모습을 볼 수 있다.
- 물론 은닉 층의 노드 갯수를 늘리면 성능이 나아지는 모습을 보여주지만 Linear Activation이 사용되었으면 dim = 2면 충분히 바로 해결되는 문제이기에 ReLU의 정보 손실성을 강조해주는 실험 결과이다.
- 더군다나 MobileNet V2에선 ResNet의 구조를 사용하는데 Bottleneck 구조에선 채널 수가 줄어들기에 정보 손실이 더욱 막대할 것이다.
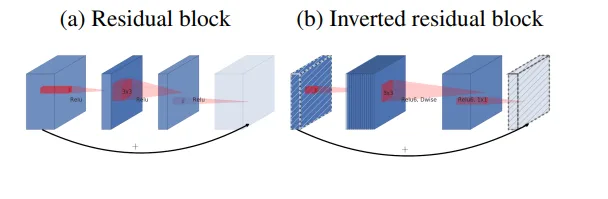
Inverted Bottleneck
- 위의 문제점을 해결하기 위해 논문에서 제시한 구조는 Inverted Bottleneck 구조이다.
- Inverted라는 단어를 가지고 있듯 기존 Bottleneck 같이 채널 수를 줄이고 다시 늘리는 것이 아니라 채널 수를 늘리고 다시 줄이는 방식을 택한 것이다.
- 해당 방법이 가능했던 이유는 Depth-wise Separable Convolution으로 인해 대폭 줄인 파라미터 수 덕분이다.
- 이에 대한 장점은 채널 수를 늘려 ReLU의 정보 손실량을 줄일 수 있다.
- 그렇다면 쭉 채널 수를 늘리면 되지 왜 다시 줄이는 방법을 택했을까?
- 물론 채널 수를 지속적으로 늘리면 파라미터 수가 기하급수적으로 증가할 것이다.
- 그리고 원래 채널 수로 돌아오면 skip-connection이 가능해진다.
정보 손실과 비선형성의 Trade-off (Linear Activation)
- 우선 Inverted Bottleneck의 연산 과정을 한번 알아보자.
- 입력 값이 들어오면 먼저 1x1 Convolution으로 채널 수를 늘려준다.
- ReLU6를 통과시킨 이후 3x3 Depth-wise Convolution으로 채널 별 spatial 정보를 추출한다.
- ReLU6를 통과시킨 이후 다시 1x1 Convolution으로 기존 채널 수로 줄여준다.
- ReLU6란, 반환 값의 최대치를 6으로 제한시키는 것이다.
- $\min(\max(0,x),6)$
- 대부분의 모델이 activation 값이 6을 넘지 않아 6으로 제한시켜 계산에 사용되는 비트 수를 줄여 메모리 효율성을 늘리기 위함이다.
- Linear Activation을 통과시킨다.
- Linear Activation이라니 참으로 황당한 연산 방식일 것이다. 요즘 논문에서 Linear Activation을 사용하는 것을 본지가 꽤나 오래됐을 것이다.
- 하지만 해당 논문에선 ReLU의 정보 손실성을 꽤나 강조하였고 채널을 줄인 이후 ReLU6를 통과시켜버리면 Inverted Bottleneck 구조의 의의를 무너뜨려버리는 셈이다.
- 즉, 약간의 비선형성을 포기하고 정보 손실을 줄이는 방식을 채택한 것이다.
전체 구조
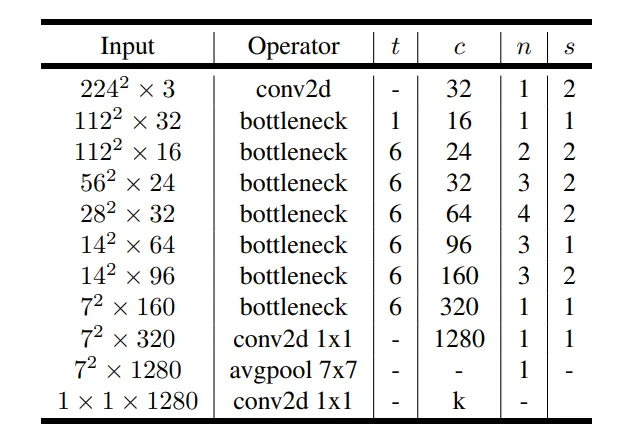
- 위 테이블에서 t는 expansion ratio 즉, inverted bottleneck에서 t배로 채널 수가 증가한다. c는 출력 채널수, n은 블럭 반복 횟수, s는 stride를 의미한다.
- 첫 Convolution은 기존 Convolution으로 진행되고 이후 첫 Bottleneck만 expansion없이 진행 후 GAP-FC 이전까지는 모두 t=6으로 inverted bottleneck으로 진행된다.
- 3번째 Convolution 과정을 보자면…
- 16 채널이 입력되어 채널이 6배 증가하여 96 채널이 된 이후 Depth-wise Convolution 진행이 된다.
- 이후 Point-wise Convolution으로 채널 수를 24로 줄인다.
- n = 2이기 때문에 한번 더 반복하는데 이번엔 입력 채널이 24이므로 채널이 144로 증가한다.
- 이후 Depth-wise Convolution 진행 후 Point-wise Convolution으로 24채널로 다시 복귀한다.
- 이때는 Skip-Connection이 성립이 된다. (입/출력 채널 수가 동일하기 때문이다)
성능 검증
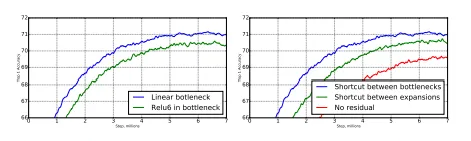
- 왼쪽 그래프를 보면 Inverted Bottleneck 마지막에 ReLU가 아닌 Linear Activation을 쓴 것이 성능이 확실히 더 개선된 것을 볼 수 있다.
- 또한, Skip-Connection의 구조도 Bottleneck 전체를 건너뛰는 구조가 성능이 가장 잘 나온 것을 볼 수 있다.
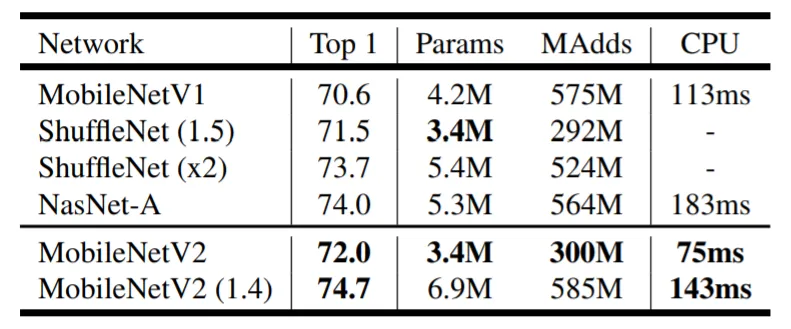
- MobileNet V1과 비교하니 약 80만개의 파라미터 수를 줄이면서도 성능이 1.4% 개선된 것을 볼 수있다.
코드 구현
-
DepSepConv 클래스
class DepSepConv(nn.Module): def __init__(self, in_channels, out_channels, stride): super().__init__() self.depthwise = nn.Sequential(nn.Conv2d(in_channels,in_channels,3, stride = stride, padding = 1, groups = in_channels, bias=False), nn.BatchNorm2d(in_channels), nn.ReLU6(inplace=True)) self.pointwise = nn.Sequential(nn.Conv2d(in_channels,out_channels,1, bias=False), nn.BatchNorm2d(out_channels)) # no activation!! def forward(self, x): x = self.depthwise(x) x = self.pointwise(x) return x- V1과 달라진 점은 Point-wise Convolution 연산에서 activation 파트가 사라졌다.
-
InvertedBlock 클래스
class InvertedBlock(nn.Module): def __init__(self, in_channels, exp_channels, out_channels, stride): super().__init__() self.use_skip_connect = (stride==1 and in_channels==out_channels) layers = [] if in_channels != exp_channels: # 채널 안늘어날 때는 1x1 생략. 즉, 1x1은 채널을 키워야할 때만 존재한다. layers += [nn.Sequential(nn.Conv2d(in_channels, exp_channels, 1, bias=False), nn.BatchNorm2d(exp_channels), nn.ReLU6(inplace=True))] layers += [DepSepConv(exp_channels, out_channels, stride=stride)] self.residual = nn.Sequential(*layers) def forward(self, x): if self.use_skip_connect: return x + self.residual(x) # 더하고도 ReLU 하지 않는다! 그래야 linear block이 되는 거니까 (근데 그냥 pre-act 구조로 쓴다면 어땠을까?는 약간의 아쉬움) else: return self.residual(x)- use_skip_connect라는 어트리뷰트를 만들어 stride가 1이고 입/출력 채널 수가 동일할 때만 skip-connection이 이루어지도록 해준다.
- forward 메서드 참고
- t = 1 같이 채널 증가가 없을 때에는 if문으로 키우는 레이어를 생략시킨다.
- use_skip_connect라는 어트리뷰트를 만들어 stride가 1이고 입/출력 채널 수가 동일할 때만 skip-connection이 이루어지도록 해준다.
-
MobileNetV2 클래스
class MobileNetV2(nn.Module): def __init__(self, num_classes=1000): super().__init__() self.configs=[# t, c, n, s [1, 16, 1, 1], [6, 24, 2, 2], [6, 32, 3, 2], [6, 64, 4, 2], [6, 96, 3, 1], [6, 160, 3, 2], [6, 320, 1, 1]] self.stem_conv = nn.Sequential(nn.Conv2d(3, 32, 3, padding=1, stride=2, bias=False), nn.BatchNorm2d(32), nn.ReLU6(inplace=True)) in_channels = 32 layers = [] for t, c, n, s in self.configs: for i in range(n): stride = s if i == 0 else 1 exp_channels = in_channels * t layers += [InvertedBlock(in_channels=in_channels, exp_channels=exp_channels, out_channels=c, stride=stride)] in_channels = c self.layers = nn.Sequential(*layers) self.last_conv = nn.Sequential(nn.Conv2d(in_channels, 1280, 1, bias=False), nn.BatchNorm2d(1280), nn.ReLU6(inplace=True)) self.avg_pool = nn.AdaptiveAvgPool2d((1,1)) self.classifier = nn.Sequential(nn.Dropout(0.2), # 논문에는 상세히 나와있진 않지만 토치 문서에 있어서 포함 -> 채널 축으로 특징들이 놓여있고 그것들을 일부 가려보며 학습하는 의미 nn.Linear(1280, num_classes)) def forward(self, x): x = self.stem_conv(x) x = self.layers(x) x = self.last_conv(x) x = self.avg_pool(x) x = torch.flatten(x, 1) x = self.classifier(x) return x