ResNet
ResNet(2015.12)
요약
- ResNet은 Vanishing Gradient 문제를 해결하기 위해 Skip-Connection을 도입한 모델로, 깊은 네트워크에서도 성능 저하를 방지하며, Bottleneck 구조를 통해 파라미터 수를 줄인다. ResNet은 VGGNet과 비교해 훨씬 더 깊은 네트워크를 가능하게 한다.
논문 출처
기존 문제점
- 한창 Vanishing Gradient 문제가 대두되자 그에 대한 해결 방안으로 Batch Normalization과 ReLU가 도입되었다.
- BN과 ReLU의 조합으로 문제가 해결된듯 하였으나 Kaiming He는 새로운 문제를 제기하였다.
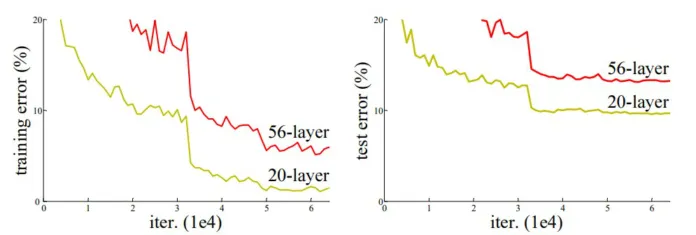
- Vanishing Gradient 문제가 해결이 됐으면 층이 깊어질수록 성능이 올라가는게 정상적인 문제일텐데 왜 층이 깊어지면 성능이 떨어질까?
- 예를 들어 50층짜리 모델이 10층짜리 모델의 성능을 흉내내고 싶다면 나머지 40층을 0으로 만들면 10층을 따라할 수 있을텐데 어째서 56층이 20층보다 성능이 안나오는 것인가?
- 위의 그림을 보면 56층의 에러가 20층의 모델의 에러보다 높은 것을 볼 수 있다.
- 하지만 이게 또 Vanishing Gradient문제는 아닌게 에포크가 지날수록 성능은 낮아지고 있기에 그라디언트가 손실되는 것 같지는 않다.
- 실제로 Kaiming He가 층마다 그라디언트 값을 확인해봤을 때 그라디언트가 손실되지는 않는다고 하였다.
- 그렇다면 Vanishing Gradient 말고 다른 문제가 있다는 결론에 다다르게 된다.
Loss Landscape (논문 외 주제)
- 위에서 대두된 새로운 문제를 논문상에서는 Degradation이라고 언급하지만 나중에 되서야 많은 이들이 Loss Landscape가 너무 복잡해지고 꼬불꼬불해지는 문제라는 것이 정설이다.
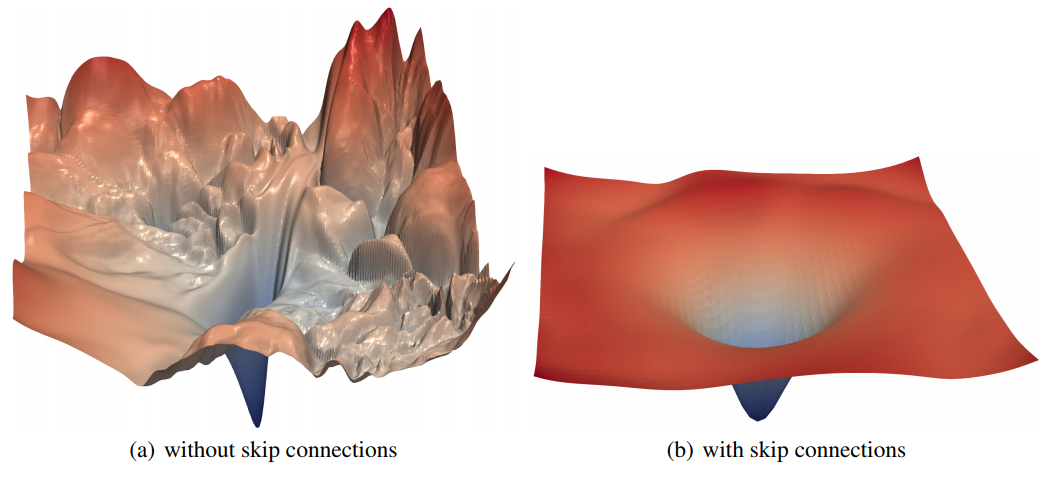
- 여기서 먼저 잠깐 언급하자면 ResNet은 skip-connection을 도입한 모델이다.
- 위의 그림은 ResNet을 도입한 Loss Landscape인데 skip-connection을 도입하자 loss landscape가 매끈해지고 local minimum에 빠질 위험이 줄어든다.
- 하지만 여기서 드는 고민이 있어야한다.
- Loss Landscape를 어떻게 3차원상에 그릴수가 있나?
- Weight의 수치에 따라 loss가 달라지는 것이면 모든 파라미터를 축으로 삼고 그려야된다. 그러면 고작 3차원으로 그릴 수가 없을텐데?
- $\theta^* = \text{optimized weight vector} \ \delta_{i,j} = \text{scaled random vector of ith layer, jth filter} \ \eta_{i,j} = \text{another scaled random vector of ith layer, jth filter}$ 라고 가정했을 때,
- $f(\alpha, \beta) = L(\theta^*+\alpha\delta_{i,j} + \beta\eta_{i,j})$ 함수를 그린 것이 Loss Landscape다.
- $\alpha$와 $\beta$를 -1과 1사이로 조정하며 그리는 것이다.
- 라고 말하면 이해가 잘 안될 거 같아서 조금 이해하기 쉽게 풀어 서술해보겠다.
- $\theta^*$는 즉 학습이 되어진 파라미터 벡터이다. 해당 벡터의 위치를 중앙으로 두고 Local Minimum이라는 가정한다.
- 이후 $\theta^*$의 크기와 동일하게 $N(0,1)$ 에서 랜덤하게 벡터를 두개 만든다. (그게 $\delta, \eta)$
- 즉, $\delta, \eta$는 (1 x 모든 파라미터의 갯수) 사이즈가 된다.
- 그 다음 filter-wise normalization이라는 과정을 거쳐야된다. (필수는 아니고 옵션이지만 정규화를 진행하면 loss landscape가 더 잘 나온다고 한다.)
-
$\delta_{i,j} = \dfrac{\delta_{i,j}}{ \delta_{i,j} _2} \theta^*_{i,j} _2$ - 델타 벡터를 델타 벡터의 크기로 나누어 크기를 1로 normalize를 해준 다음 최적화된 벡터의 크기를 곱해주는 것이다.
-
Skip-Connection / Residual Learning
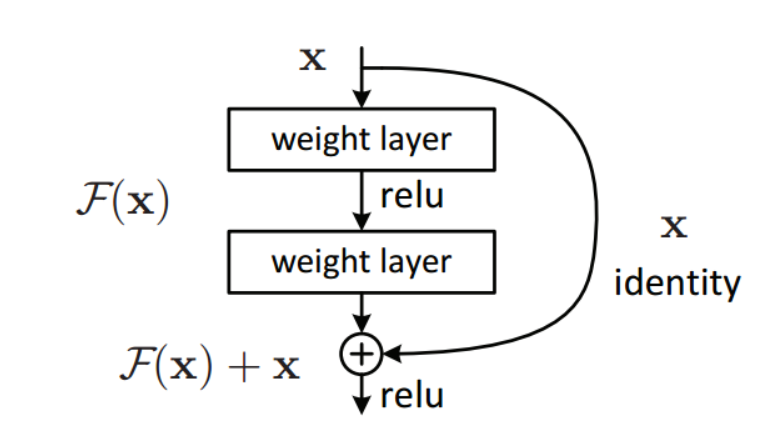
- 위의 문제를 해결하기 위해 He가 제안한 방법은 Skip-Connection이다.
-
즉, 블럭을 통과하기 전의 값을 출력 값에 더해주는 것이 skip-connection이다.
- 그렇다면 왜 이러한 구조가 성능 개선에 도움이 되는 걸까?
- $H(x)$가 optimal 한 블럭이라고 가정하자.
- 즉, 학습이 되어 Loss가 0이 되는 weight들이 H(x)인 것이다.
- 그리고 $H(x) = F(x)+x$인데 $H(x) = x$라는 구조로 만들고 싶다고 해보자.
- 그러면 $F(x)$가 0이 되도록 해야되는 것이다.
- 그런데 굳이 $F(x)+x$를 하여서 $H(x) = x$라는 형태로 만드는 이유가 무엇일까?
- Skip-connection이 없다면 weight layer들이 identity matrix가 되어야 입력 값이 그대로 나오는 반면,
- Skip-connection이 있다면 weight layer들이 다 0이면 출력값에 더해지는 x로 인해 출력값이 그대로 나오는 것이다.
- 그리고 weight initialization이 0 근처로 되기 때문에 $H(x) = x$로 만들기 더욱 쉬울 것이다.
왜 $H(x) = x$ 인가?
- 그런데 또 드는 의문점이 왜 $H(x) = x$인가? 이게 왜 성능이 올라가는가?
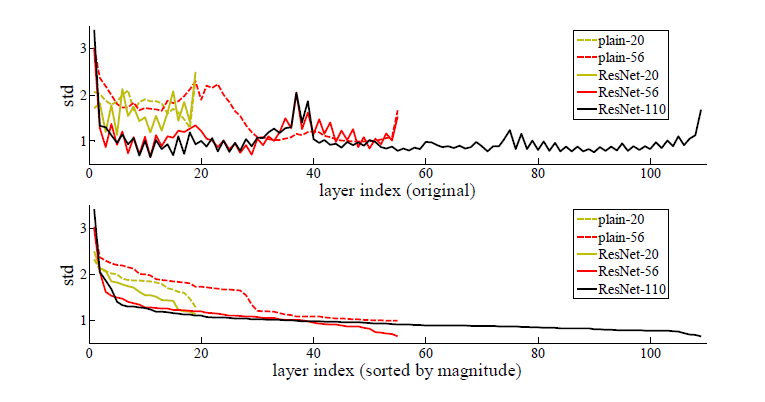
- 위의 그림은 각 레이어 사이의 편차 즉, standard deviation을 보여주는 그래프이다.
- 보면 층이 깊어질수록 std가 작아지는 것을 볼수가 있는데 이 말은 레이어에서 레이어로 넘어갈 때는 값이 차이가 크지 않다는 것이다.
- 즉, 차근차근 값을 바꾸어 나가는 것이 이상적인 모델이라는 결론에 다다른다. 그 말은 $H(x) \approx x$라는 뜻이다.
- Skip-connection을 통해 x를 출력 값에 더해주면서 $H(x) \approx x$가 쉽게 학습되도록 유도하며 차근차근 값을 바꾸어 나가는게 좋은 모델이라는 것을 귀뜸 해준다는 것으로 이해하면 쉽다.
ResNet 구조
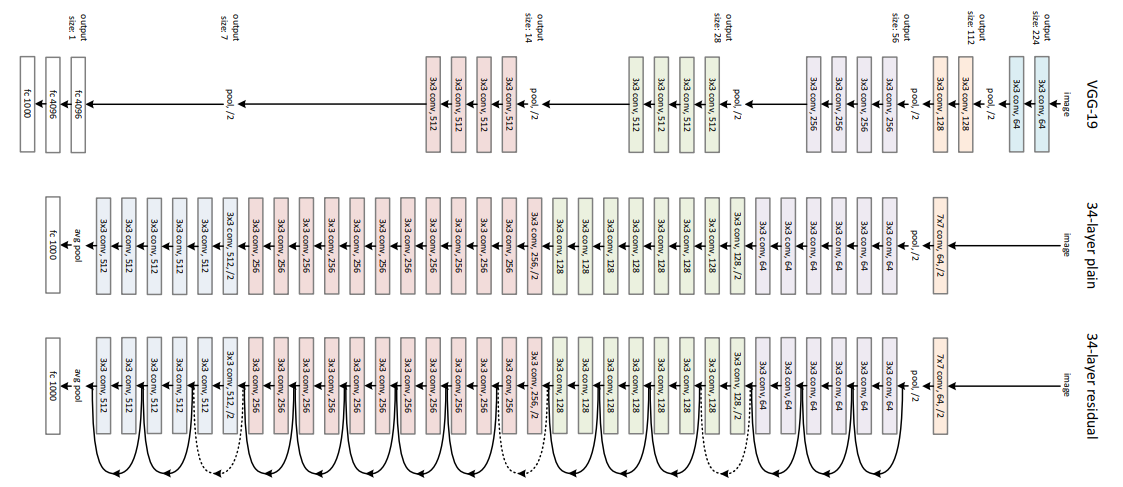
- 기본적으로 ResNet은 VGGNet의 구조를 따른다.
- 대부분 3x3 필터를 사용하며 피처맵의 사이즈를 반으로 줄일 때 채널 수를 늘린다.
- 대신에 사이즈를 줄일 때 풀링 대신 stride = 2를 사용을 한다.
- Skip-Connection은 2층마다 매번 반복을 해준다.
- Conv → BN → ReLU → Conv → BN → +x → ReLU의 형식으로 반복이 된다.
- 점선은 채널 수가 바뀔 때마다 1x1 convolution을 통해 +x도 채널 수를 늘려준다는 의미이다.
Bottleneck
- ResNet은 최대 152층을 가지는 모델이기에 아무리 가장 작은 3x3 필터를 사용하지만 파라미터 수가 너무나 많아진다.
- 그렇기에 He가 제안한 방법은 Bottleneck 구조이다.
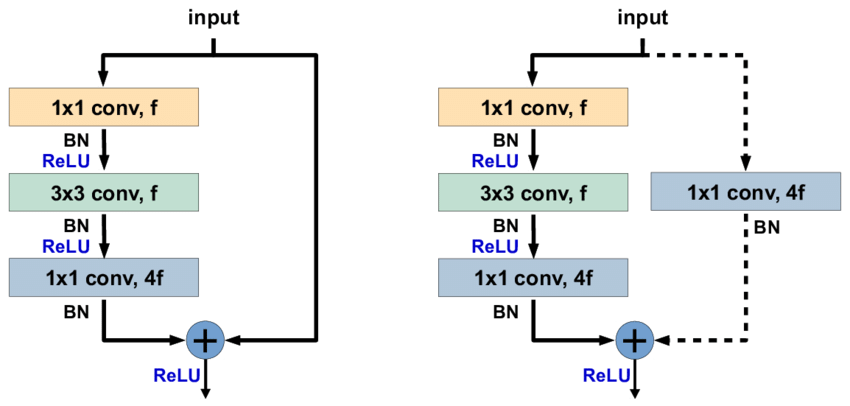
- 3x3블록 전후에 1x1블럭을 넣어줌으로써 디멘션을 줄여 파라미터 수를 줄이는 방법이다.
- 1x1 conv를 이용하여 채널 수를 반으로 줄여주며 계산 복잡성을 줄여준다.
- 이후 3x3 conv를 사용하여 1x1으로 인해 잃어버린 위치적 특성을 찾아주고
- 1x1로 다시 채널을 증가시켜주며 특징의 갯수를 늘려준다. (4f 즉, 4배로 늘려준다)
- 이전 층에서 stride = 2로 인해 피처 맵의 사이즈가 반으로 줄었으므로 최종적으로는 채널이 2배 늘어난 것과 동일하다.
Conclusion
- ResNet은 Vanishing Gradient이외의 문제점을 발견하여 이를 해결한 최초의 모델이다.
- 물론 논문 내에서도 해당 문제에 대해 정확히 설명은 못했지만 해결은 하였다.
- Skip-Connection의 등장으로 Inception과 VGGNet과 비교가 안될 정도로 층을 깊게 만드는데 성공하였다.
코드 구현
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_channels, inner_channels, stride = 1, projection = None):
super().__init__()
#conv 레이어에서 bias=False인 이유는 BN에 bias가 들어가기 때문.
self.residual = nn.Sequential(nn.Conv2d(in_channels, inner_channels, kernel_size = 3, stride = stride, padding = 1, bias = False),
nn.BatchNorm2d(inner_channels),
nn.ReLU(inplace = True),
nn.Conv2d(inner_channels, inner_channels * self.expansion, kernel_size = 3, padding = 1, bias = False),
nn.BatchNorm2d(inner_channels * self.expansion))
self.projection = projection
self.relu = nn.ReLU(inplace = True)
def forward(self, x):
residual = self.residual(x)
if self.projection is not None:
shortcut = self.projection(x) #점선 연결
else:
shortcut = x #실선 연결
out = self.relu(residual + shortcut)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, in_channels, inner_channels, stride = 1, projection = None):
super().__init__()
self.residual = nn.Sequential(nn.Conv2d(in_channels, inner_channels, kernel_size = 1, bias = False),
nn.BatchNorm2d(inner_channels),
nn.ReLU(inplace = True),
nn.Conv2d(inner_channels, inner_channels, kernel_size = 3, stride = stride, padding = 1, bias = False),
nn.BatchNorm2d(inner_channels),
nn.ReLU(inplace = True),
nn.Conv2d(inner_channels, inner_channels * self.expansion, kernel_size = 1, bias = False),
nn.BatchNorm2d(inner_channels * self.expansion))
self.projection = projection
self.relu = nn.ReLU(inplace = True)
def forward(self, x):
residual = self.residual(x)
if self.projection is not None:
shortcut = self.projection(x) #점선 연결
else:
shortcut = x #실선 연결
out = self.relu(residual + shortcut)
return out
class ResNet(nn.Module):
def __init__(self, block, num_block_list, num_classes = 1000, zero_init_residual = True):
super().__init__()
self.in_channels = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size = 7, stride = 2, padding = 3, bias = False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace = True)
self.maxpool = nn.MaxPool2d(kernel_size = 3, stride = 2, padding = 1)
self.stage1 = self.make_stage(block, 64, num_block_list[0], stride = 1)
self.stage2 = self.make_stage(block, 128, num_block_list[1], stride = 2)
self.stage3 = self.make_stage(block, 256, num_block_list[2], stride = 2)
self.stage4 = self.make_stage(block, 512, num_block_list[3], stride = 2)
self.avgpool = nn.AdaptiveAvgPool2d((1,1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode = 'fan_out', nonlinearity = 'relu')
if zero_init_residual:
for m in self.modules():
if isinstance(m, block):
nn.init.constant_(m.residual[-1].weight, 0)
def make_stage(self, block, inner_channels, num_blocks, stride = 1):
if stride != 1 or self.in_channels != inner_channels * block.expansion:
projection = nn.Sequential(nn.Conv2d(self.in_channels, inner_channels * block.expansion, kernel_size = 1, stride = stride, bias = False),
nn.BatchNorm2d(inner_channels * block.expansion))
else:
projection = None
layers = []
layers += [block(self.in_channels, inner_channels, stride, projection)] # stride=2, 점선 연결은 첫 block에서만
self.in_channels = inner_channels * block.expansion
for _ in range(1, num_blocks): # 나머지 block은 실선 연결로 반복
layers += [block(self.in_channels, inner_channels)]
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.stage1(x)
x = self.stage2(x)
x = self.stage3(x)
x = self.stage4(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x